

Dalam senario keselamatan, peralatan pengawasan sering terdedah kepada angin - Berpindah ayunan kerana panjang - Pemasangan Jarak. Semasa kamera lebar - mod sudut menunjukkan kepekaan yang minimum terhadap gangguan luaran, Mod Telephoto Optik menguatkan getaran mekanikal, yang membawa kepada imej yang ketara kabur atau kehilangan tumpuan sasaran. Akibatnya, mekanisme penstabilan aktif telah muncul sebagai keperluan teknikal kritikal untuk sistem pengawasan jangka panjang. Teknologi penstabilan semasa terutamanya jatuh ke dalam dua kategori: Penstabilan Imej Optik (OIS) dan Penstabilan Imej Elektronik (EIS).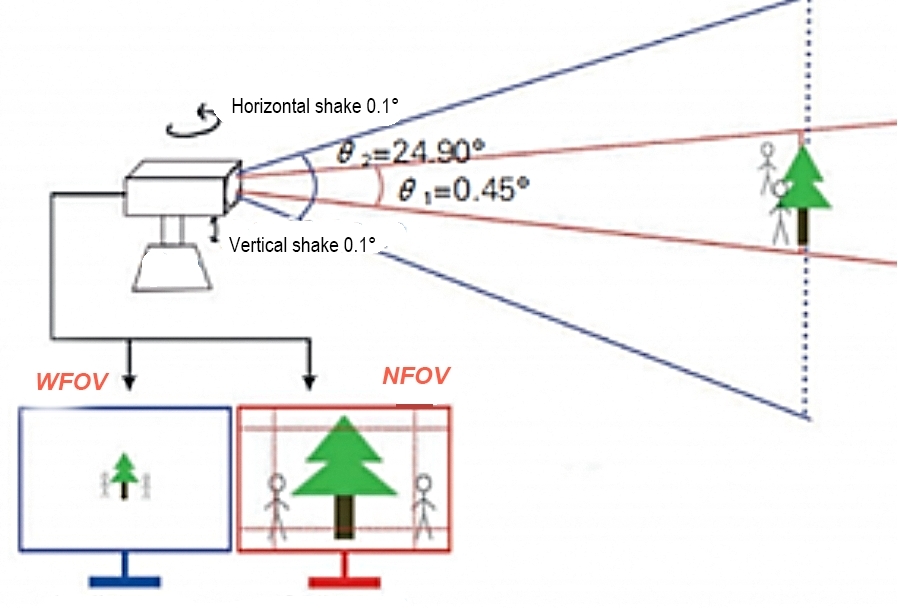
EIS menggunakan pos imej - Algoritma Pemprosesan untuk mencapai penstabilan imej. Ia memerlukan pukulan semasa untuk diperbesar, mengakibatkan 10% - 20% kehilangan bidang pemantauan. Dalam teknologi EIS, lensa hanya bertanggungjawab untuk pengambilalihan imej. Selepas sensor membentuk imej, ia mesti terlebih dahulu imej stabil menggunakan algoritma teras pemproses imej yang dibina, dan kemudian video dimampatkan dan dihantar. Jenis penstabilan imej ini sepenuhnya dicapai melalui teknologi pemprosesan digital, yang mengurangkan kualiti video dan mempunyai kesan penstabilan umum. Ia biasanya digunakan dalam produk akhir yang rendah kerana kelebihan kosnya.

OIS menggunakan binaan - dalam giroskop dalam perhimpunan kanta untuk mengesan getaran kamera. Gyroscope menukarkan data gerakan mekanikal ke dalam isyarat elektrik yang dihantar ke pengawal OIS. Unit pemprosesan pusat pengawal dengan segera menganalisis dan mengira anjakan atau sudut yang perlu dipenuhi oleh lens Dalam reka bentuk optik, dengan menambahkan kanta bergerak, peralihan kanta dikawal berdasarkan jumlah goncangan, mengimbangi laluan optik kembali ke keadaan yang stabil.
Dalam setiap kitaran pendedahan, OIS mesti melaksanakan secara berurutan: Pengesanan getaran, pemprosesan isyarat, dan penggerak lensa pampasan. Seluruh proses adalah gerakan servo, yang juga mempunyai ciri -ciri masa pengesanan pendek, kelajuan pemprosesan isyarat cepat, pergerakan pampasan kanta kecil, dan mengamalkan algoritma kawalan PID yang mudah dan stabil.
